
ross
-

Camara PTZ Ross Pivot Cam SE
Ross$0.00Con un nuevo sensor CMOS de ½ pulgada y 12.4 megapíxeles, la PIVOTCam-SE captura video HD progresivo de 1080P con detalles superiores. La interfaz ...
Ver todos los detalles -
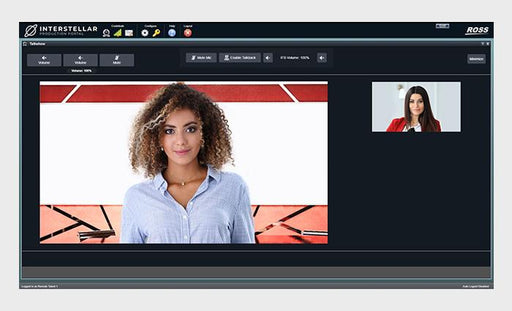

INTERESTELAR PORTAL DE PRODUCCIÓN
Ross$0.00Interstellar ofrece una experiencia de usuario intuitiva que permite a los colaboradores remotos enviar videos de alta calidad y baja latencia a la...
Ver todos los detalles -


MIRA EXPRESS SERVIDOR DE REPRODUCCIÓN
Ross$0.00Servidor de reproducción profesional de cuatro cámaras / dos canales de reproducción construido sobre una plataforma de servidor sólida como una ro...
Ver todos los detalles -
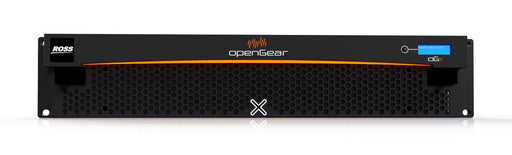

OpenGear OGX Infraestructura Modular
Ross$0.00Marco para tarjetas openGear. Trasero modular (Módulos de E / S no incluidos).Puede mezclar y combinar cualquier tipo de señal con los módulos post...
Ver todos los detalles -

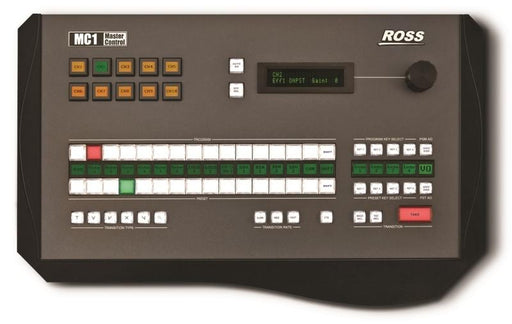
Panel de control Ross MC1 con 16 botones de fuente
Ross$0.00El panel de control opcional MC1 es completamente personalizable y admite operaciones escalables de múltiples canales.Los botones suaves al tacto p...
Ver todos los detalles -


Ross Carbonite SOLO 1 M / E 9 entradas y 6 salidas Todo en uno
Ross$0.00• 9 XPTs para los buses BKGD, PST y KEY / AUX / CC• Botones dedicados de Auto Transificador Keyer• Área de transición completa con función exclusiv...
Ver todos los detalles -


ROSS CARBONITE ULTRA + PANEL
Ross$0.00Más potente, más compacto y más asequible que nunca. Carbonite Ultra utiliza la última tecnología para destilar lo mejor de la serie Carbonite en u...
Ver todos los detalles -
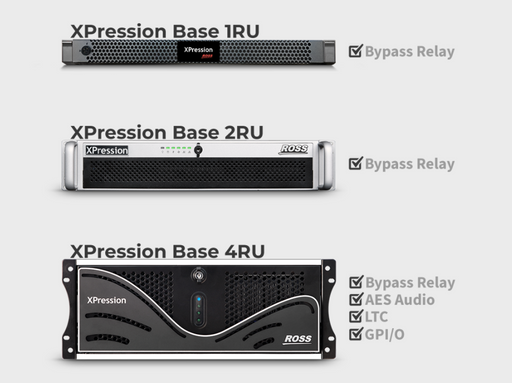

Ross Xpression
Ross$0.00GRÁFICOS EN MOVIMIENTO EN TIEMPO REAL XPression es el sistema de generación de gráficos en movimiento en tiempo real de más rápido creci...
Ver todos los detalles -
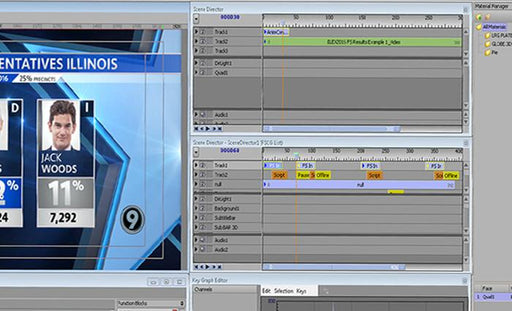
Ross XPression
Ross$0.00GRÁFICOS EN MOVIMIENTO EN TIEMPO REAL XPression es el sistema de generación de gráficos en movimiento en tiempo real de más rápido creci...
Ver todos los detalles -
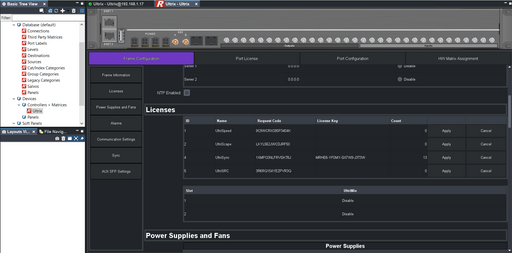

Router Ross Ultrix 1RU
Ross$0.0016x16 con 2 puertos AUX I / O Ultrix es una plataforma de procesamiento compacta pero increíblemente poderosa capaz de conmutar señales de video de...
Ver todos los detalles -

Router Ross Ultrix 2RU
Ross$0.00Ultrix es una plataforma de procesamiento compacta pero increíblemente poderosa capaz de conmutar señales de video de 270 Mb / sa 12 Gb / s, y rea...
Ver todos los detalles -
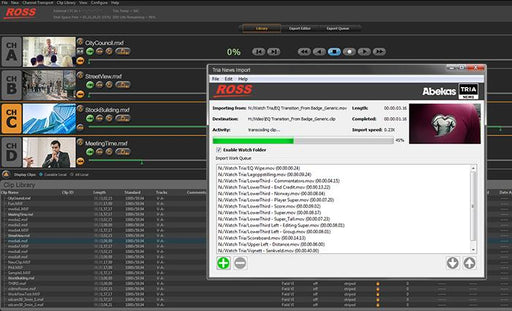

Tria News Ross
Ross$0.00NOTICIAS DE TRIA | SERVIDOR DE EMISIÓN DE NOTICIAS Tria News está diseñado precisamente para los entornos de redacción de televisión en vivo de alt...
Ver todos los detalles





















